MiniMACS6 Stabilizes the Furuta Pendulum
Simulating Heat Transfer in Power Cables Using the Finite Element Method (FEM)
2021 Top Article - How to Find the Right Damper for Your Application
True Flexibility in your Robotics System

Evolution in the Press Shop - Intelligent, Camera-based Tool Protection in Stamping and Forming Technology

How to Select the Best Motor for a Jointed Arm Robot

Choosing the Right Encoder for Your Robot

Handling Omnidirectional 3D Vision Data in Mobile Robots

How to Select the Right Motor for Your Robot

Benefits of a Tactical Grade IMU in Low-cost GNSS/INS Systems

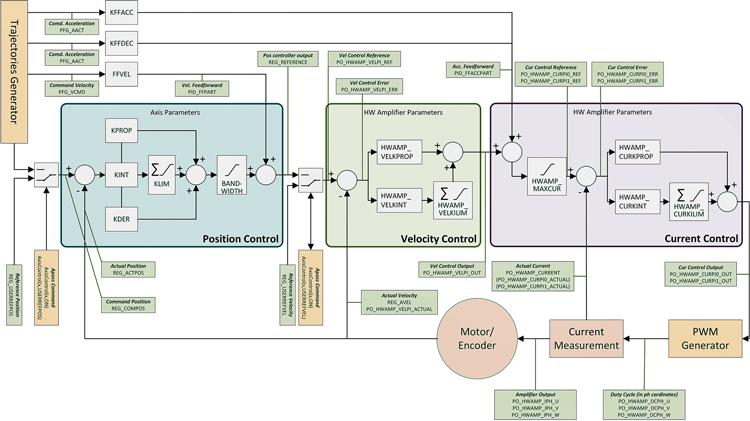
6 Cool Servo Drive Features You Might Not Know About

How Robotics is Transforming Manufacturing

The Axion xB series frame grabbers from BitFlow, Inc.

10 Different Options For Controlling Linear Actuators

Design and Operation Features of a BDC Motor Controller

Records 16 to 30 of 63
First | Previous | Next | Last
Featured Product

