An inertial measurement unit (IMU) is a device that directly measures the three linear acceleration components and the three rotational rate components (6-DOF) of a vehicle.
 7 Reasons Your Life Depends on an Accurate IMU (Inertial Measurement Unit) in a Self-Driving Car
7 Reasons Your Life Depends on an Accurate IMU (Inertial Measurement Unit) in a Self-Driving Car
Mike Horton | ACEINNA
An inertial measurement unit (IMU) is a device that directly measures the three linear acceleration components and the three rotational rate components (6-DOF) of a vehicle. An IMU is unique among the sensors typically found in an autonomous vehicle because an IMU requires no connection or knowledge of the external world.
A self-driving car requires many different technologies, for example — LIDAR to create a precise 3-D image of the local surroundings, radar for ranging targets using a different part of the EM spectrum, cameras to read signs and detect color, high-definition maps for localization, and more. Unlike the IMU, each of these technologies involves the external environment in order to provide data back to the software stack for localization, perception, and control. This unique “independent” property of the IMU, makes it a core technology for both safety and sensor-fusion.
.png)
An Accurate IMU can Mitigate Issues in RED
The following list of 7 Top Reasons is just a start, additional reasons and benefits of an accurate IMU are welcomed as responses to this post.
#1 Safety First
The system engineer needs to consider every scenario and always have a back up plan. Failure Mode Effects Analysis (FMEA) formalizes this requirement into design requirements for risk mitigation. FMEA will ask what happens if the LIDAR, Radar, and Cameras all fail at the same time? An IMU can dead-reckon for a short period of time, meaning it can determine full position and attitude independently for a short while. An IMU alone can slow the vehicle down in a controlled way and bring it to a stop … providing the best practical outcome in a bad situation. While this may seem like a contrived requirement, it turns out to be a fundamental one to a mature safety approach.
#2 A Good Attitude
An accurate IMU can determine and track attitude precisely. We often think of a car’s position or location, but when driving the direction or heading is equally crucial. Driving the slightly wrong direction even for a brief instant, will put you in the wrong lane. Dynamic control of the vehicle requires sensors with dynamic response, and an accurate IMU does a nice job of tracking dynamic attitude and position changes accurately. Due to its fully environment independent nature, an IMU can even track the really tricky cases such as the slipping and skidding where tires lose traction. A precise attitude measurement is often useful an input into other algorithms. While LIDAR and Cameras can be useful in determining attitude, GPS is often pretty useless. Finally, a stable independent attitude reference has value in calibration and alignment.
#3 Accurate Lane Keeping
It turns out when humans are not distracted or drunk, we are typically not bad at driving. A typical driver can hold their position in a lane to better than 10cm. This is actually really tight. If an autonomous vehicle wanders in its lane, then it will appear to be a bad driver. As an example during a turn, poor lane keeping could easily result in an accident. The IMU is a key dynamic sensor to steer the vehicle dynamically, moreover the IMU can maintain a better than 30cm accuracy level for short periods (up to ten seconds) when other sensors go offline. The IMU is also used in algorithms that can cross compare multiple ways to determine position/location and then assign a certainty to the overall localization estimate. Without the IMU, it maybe impossible to even know when the location error from a LIDAR solution has degraded.
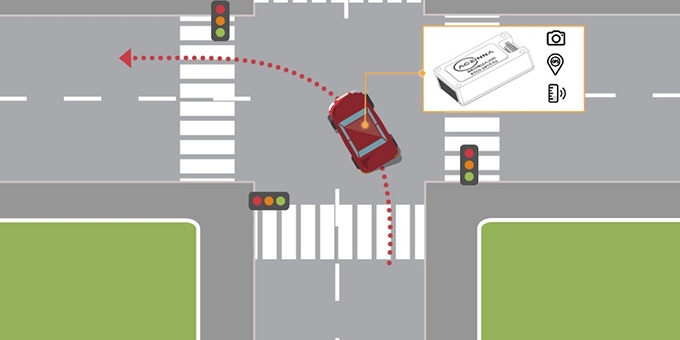
.jpg)
During turns, an accurate IMU plays a key role in lane keeping
#4 LIDAR is Still Expensive
Tesla is famous for its “No LIDAR Required” approach to autopilot technology. If you don’t have LIDAR, a good IMU is even more critical because camera-based localization of the vehicle will have more frequent periods of low-accuracy simply depending on what is in the camera scene or the external lighting conditions. Camera based localization uses “SIFT” feature tracking in the captured images to compute attitude. If the camera is not stereo (often the case) inertial data from the IMU itself is also a core part of the math to compute the position and attitude in the first place.
#5 Compute is not Free
The powerful combination of high-accuracy LIDAR and high-definition maps is at the core of the most advanced Level 4 self-driving approaches such as those being tested by Cruise and Waymo. In these systems LIDAR scans are in real-time matched to the HD map using convolutional signal processing techniques. Based on the match, the precise location of vehicle and attitude is estimated. This process is computationally expensive. While we all like to believe the cost of compute is vanishingly small, on a vehicle it simply is not that cheap. The more accurately the algorithm knows its initial position and attitude, the less computation required to compute the best match. In addition, by using IMU data, the risk of the algorithm getting stuck in a local minimum of HD map data is reduced.
#6 GPS/INS: Making High-Accuracy GPS Work
In today’s production vehicles GPS systems use low-cost single-frequency receivers. This makes the GPS accuracy pretty useless for vehicle automation. However, low-cost multi-frequency GPS is on the way from several silicon suppliers. On top of this upcoming silicon, network-based correction solutions such as RTK and PPP can provide GPS fixes to centimeter level accuracy under ideal conditions. However, these solutions are very sensitive to the environment — such as bridges, trees, and buildings. It is well established that the way to overcome this challenge and improve precisions GPS reliability is to use high-accuracy IMU aiding at a low-level in the position solution. Such GPS/INS techniques include tightly-coupled and ultra-tightly-coupled GPS/INS. These are coming soon to the automotive market (stay tuned for exciting updates).
#7 Car’s Already Need an IMU
Turns out production automobiles already have anywhere from 1/3 of an IMU to a full IMU on board. Vehicle stability systems rely heavily on a Z-axis gyro and lateral X-Y accelerometers. Roll-over detection relies on a gyro mounted with its sensitive axis in the direction of travel. These sensors have been part of the vehicles safety systems for over a decade now. The only problem is that the sensor accuracy is typically too low to be of use for the prior six uses cases. So why not upgrade the vehicle to a high-accuracy IMU and help it drive autonomously? The main barrier has been cost.
Aceinna along with other companies in the industry are working hard to remove the cost barrier. Check-in with Aceinna to learn about its latest offerings in low-cost, precision IMUs for affordable autonomous.
(1).jpg)
Aceinna’s IMUs are pushing the boundary of price-performance
The content & opinions in this article are the author’s and do not necessarily represent the views of RoboticsTomorrow
Comments (0)
This post does not have any comments. Be the first to leave a comment below.
Featured Product

